







Et voila j'ai enfin reçus mon robot Wall-E , tous frai payer , et bien sûr d'occasion.
Voici la photo:

Dimension du robot Wall-E:
26 cm de haut.
23 cm de large.
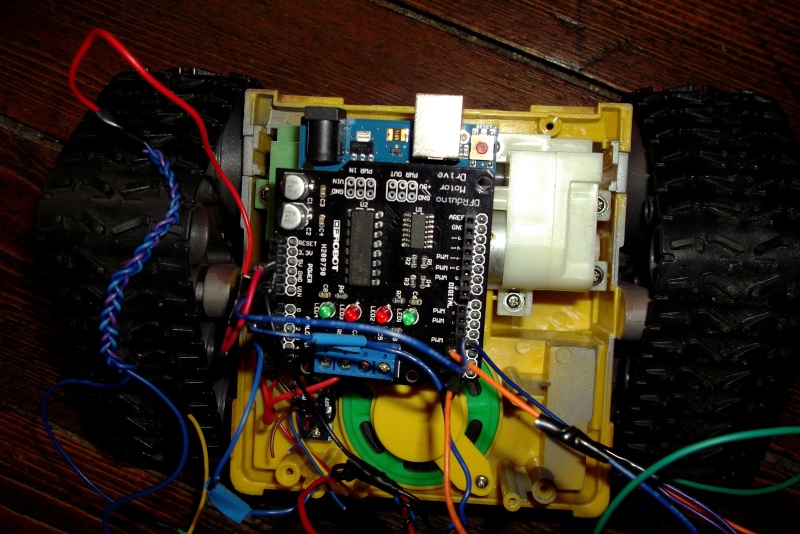
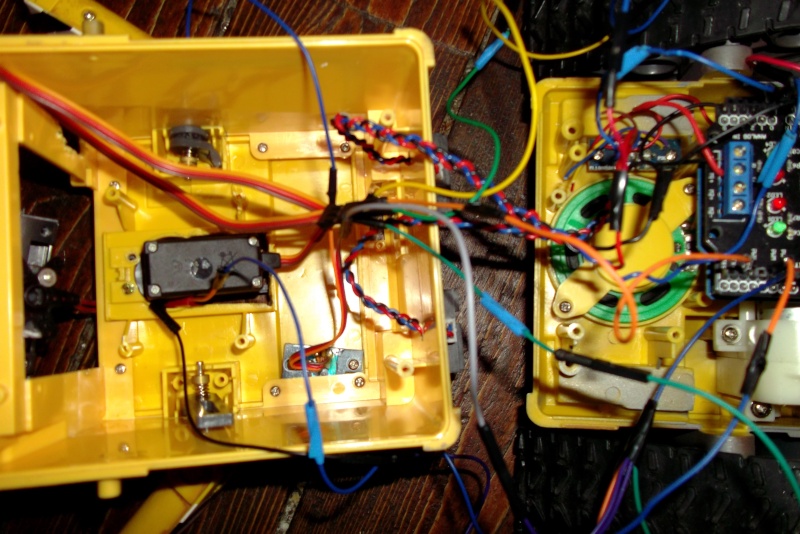
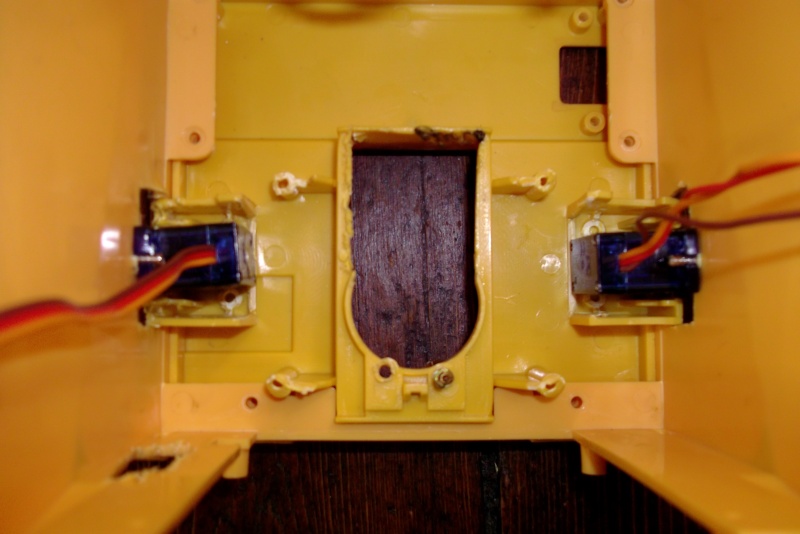
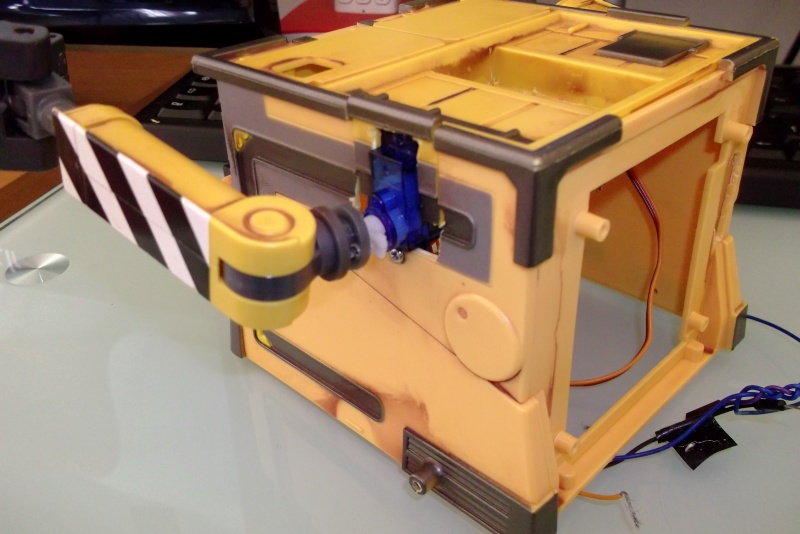
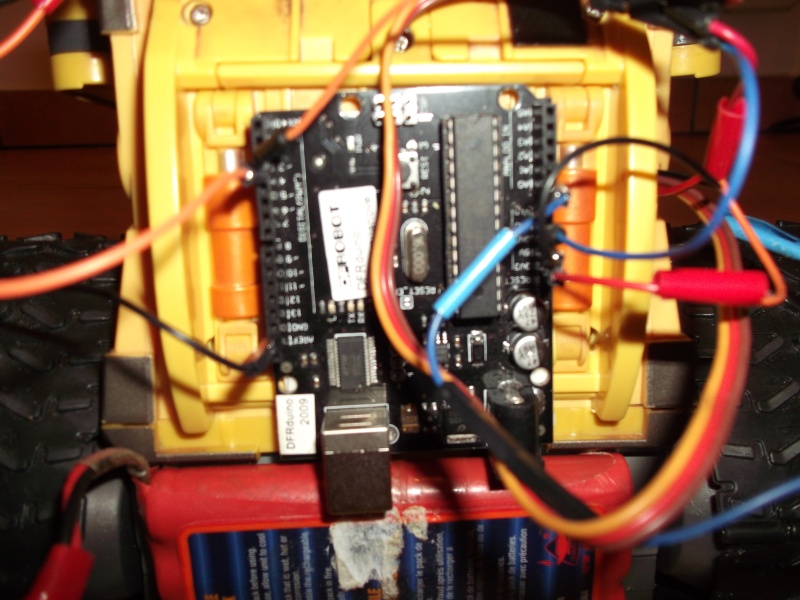
Petit avancé , j'ai commencé a démonté le robot wall-e pour lui rajouté un
servo pour la rotation de sa tête , plus
une carte DFRduino Duemilanove 328 , et
un capteur sharp infrarouge .
La fonction que je luis et rajouté et de suivre un mouvement avec sa
tête.





Aussi comme je les dis plus haut ^^ grasse au capteur infrarouge sharp j'ai pu développé un morceau de
code qui
permet au capteur infrarouge sharp de suivre un mouvement ,
dans la vidéo que vous verré , le capteur infrarouge
sharp suis le
mouvement de ma main.
Voici la vidéo que j'ai monté:
[dailymotion]
Capteur infrarouge sharp suis des mouvements par avatardu33[/dailymotion]
Pour faire le code en question, j'ai suivi cette algorithme.
//scanner code
if sharp IR detects object
scanning IR turns left
else //no object detected
scanning IR turns right
//robot motion code
if scanner is pointing far left
robot turns left
else if scanner is pointing far right
robot turns right
else //scanner pointing forward
robot drives straight
La suite de mon projet ce déroulera bientôt.
Voici la vidéo:
La suite bientôt...
Voici la photo:
Dimension du robot Wall-E:
26 cm de haut.
23 cm de large.
Petit avancé , j'ai commencé a démonté le robot wall-e pour lui rajouté un
servo pour la rotation de sa tête , plus
une carte DFRduino Duemilanove 328 , et
un capteur sharp infrarouge .
La fonction que je luis et rajouté et de suivre un mouvement avec sa
tête.
Aussi comme je les dis plus haut ^^ grasse au capteur infrarouge sharp j'ai pu développé un morceau de
code qui
permet au capteur infrarouge sharp de suivre un mouvement ,
dans la vidéo que vous verré , le capteur infrarouge
sharp suis le
mouvement de ma main.
Voici la vidéo que j'ai monté:
[dailymotion]
Capteur infrarouge sharp suis des mouvements par avatardu33[/dailymotion]
Pour faire le code en question, j'ai suivi cette algorithme.
//scanner code
if sharp IR detects object
scanning IR turns left
else //no object detected
scanning IR turns right
//robot motion code
if scanner is pointing far left
robot turns left
else if scanner is pointing far right
robot turns right
else //scanner pointing forward
robot drives straight
La suite de mon projet ce déroulera bientôt.
Voici la vidéo:
La suite bientôt...