







Explication, petit tuto, Matériel, est Réglage pour ZMR250 3S:
Matériels:

Châssis: ZMR250 http://www.banggood.com/fr/QAV250-250mm ... 08201307E0

Hélice: Gemfan 5030 pouces en plastique 5030 Hélice CW / CCW Pour 240 250 Cadre http://www.banggood.com/fr/Gemfan-5x3-I ... 37866.html

Carte mère: Flip32 Full http://www.banggood.com/fr/Naze32-Fligh ... 53849.html

Plaque distribution zmr/qav: http://www.banggood.com/fr/Diatone-ZMR2 ... 76127.html

Buzer: 7.4V -11.1V 2S-3S Lipo RC Batterie basse tension Indicateur d’alarme ( ce branche sur la batterie ) http://www.banggood.com/fr/Wholesale-7_ ... 25595.html

4 moteurs DYS BE1806 – 2300kv http://www.banggood.com/fr/DYS-BE1806-2 ... 46416.html

4 ESC EMAX SimonK series 12A http://www.banggood.com/fr/Emax-Simonk- ... 18126.html

Radio commande 2.4Ghz FlySky FS-TH9XB Mode 2 ( le récepteur et bien livrais avec la radio ) http://www.banggood.com/fr/Wholesale-Fl ... 47904.html

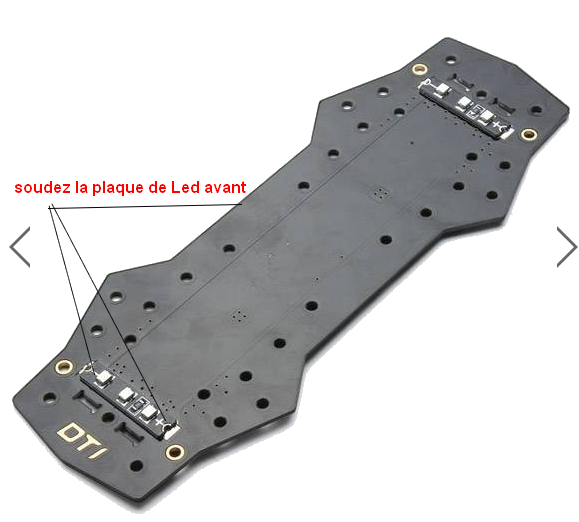
Led avant du ZMR250 http://www.ebay.fr/itm/Mini-Camera-Moun ... 3f51bd86b8

Rehausseur pour la fram http://www.ebay.fr/itm/ZMR250-ALL-IN-ON ... 5OUTb3w-FA

Led rouge a l'arrière du ZMR250 http://www.hobbyking.com/hobbyking/stor ... aff=613835

Batterie Lion puissance 11.1v 1500mAh 40c batterie lipo bt695 http://www.banggood.com/fr/Wholesale-Li ... 65641.html

Chargeur Lipo Imax B6 http://www.banggood.com/fr/Wholesale-IM ... 46220.html

j'ai opté pour se récepteur car il et plus petit et plus léger: Hobby King 2.4Ghz Receiver 6Ch V2 http://www.hobbyking.com/hobbyking/stor ... duct=33383

Canopy Shell Hood Cover For Robocat 270 270mm Racing http://www.ebay.fr/itm/121780815831?_tr ... EBIDX%3AIT

http://www.ebay.fr/itm/ZMR250-Vented-si ... 4d3cfc504f
Voilà je croit con na fait le tour pour le matos.
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Branchement de vos modules:
Branchez les esc est les moteurs.
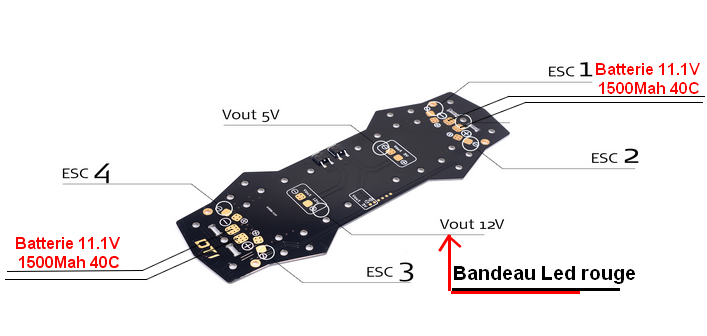
Prenez déjà votre plaque de distribution est soudez vos ESC comme sur l'image:
Vous avez 3 files noir sur les esc, est 3 files noir sur les moteurs raccordez lé, une fois finis branchez les fiche de 3 couleur, ( marron, rouge, jaune ) des esc
sur la flip32 , a oui, sur une des fiches de 3 couleur du esc, vous allez gardez le files marron, rouge, jaune, normale jusqu’à là , est sur les autre file de 3 couleur vous allez enlevez le file rouge.
Vous aller gagner de l’énergie et du poids pour votre drone.
Branchement des fiches sur flip32 voici l'image:
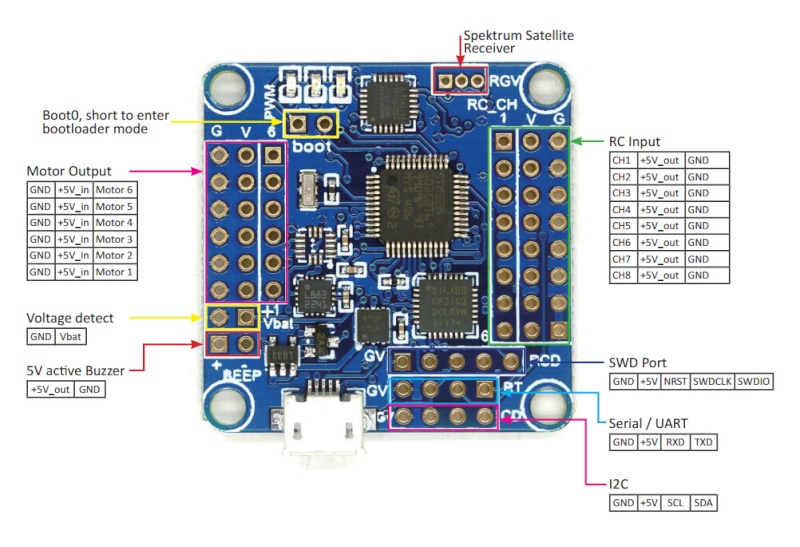
Moteur arrière droit je le branche sur le M1
Moteur arrière gauche sur M3
Moteur haut droite sur M2
Moteur haut gauche sur M4
Les M1, M2, M3, M4 et marquer sur la flip32 pour vous repérez.
Maintenant pour le branchement du récepteur radio.
Sur la flip32 est le récepteur, vous avez de marquer, CH1, CH2, CH3, CH4 etc... vous branchez vaux fiches suivent l'ordre numéroté, aussi vous allez gardez sur une de vaux fiches les 3 couleurs donc ( noire, rouge, blanc, ) est sur les autres fiches vous enlevez le file rouge est le noire, faite cette manipe si vous êtes bien en PWM.
Vous aller gagner de l’énergie et du poids pour votre drone.
Pour le reste des soudures regardez sur l'image, de la distribution ^^
Maintenant pour voir le sans de rotation de chaque moteurs, voici une image qui l’explique:
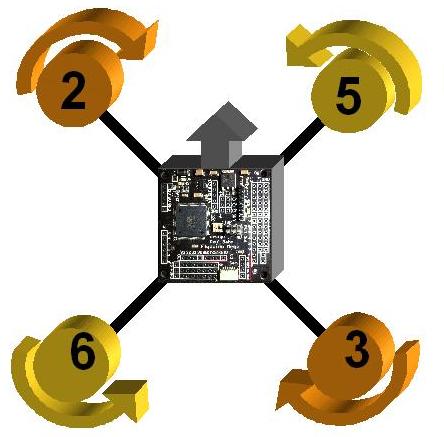
Si vos moteurs ne tourne pas dans le bon sans, inversé n’importe quelle files des 3 file noire branché du esc aux moteur, est cela serra bon.
Placement des hélices dans le bon sans.
Vous allez voire que sur les flan de l'hélice il y a des numéros avec une lettre.
Celles avec un R doivent tourner dans le sans des aiguilles d’une montre.
(c’est écris sur le dessus de l’hélice : 5030R ou 5030).
Placé votre drone de façon verticale , le nez du drone face au mure , et le cu du drone vair vous.
En haut a gauche hélice 5030R
En haut a droite hélice 5030
En bas a gauche hélice 5030
En bas a droite hélice 5030R
Réglage du Zmr250 avec le soft
Pour utiliser se soft il faut être sur Google Chrome, oubliez pas.
Alors télécharger CleanFlight ici, puis après télécharger le soft Betaflight version 2.2.0 , ou la dernière version suivante, pour ma part j'ai pris betaflight_NAZE.hex car je suis en Flip32, vous trouverez le lien Betaflight ici, une fois fini de télécharger le fichier, m'été le fichier sur votre bureau, Lancez le configurateur Chrome pour Cleanflight, puis cliquez sur « Load Firmware [Local] » et allez cherchez le fichier .hex (ou .bin) que vous venez de télécharger que vous avez mis sur votre bureau, Assurez-vous que la case « Full chip erase » est bien cochée (verte).
Cliquez ensuite sur « Flash Firmware ».
Si tout s’est bien passé, vous devriez voir cette ligne apparaître :

Votre Flip32 est maintenant flashée, débranchez et rebranchez votre Flip32 et appuyez sur le bouton « Connect » en haut a droite dans CleanFlight.
Dans setup faite un calibrage accelerometre , est un calibrage magnétometre, mettre son Drone sur une surface plate, est bien au niveau,
c'est important.
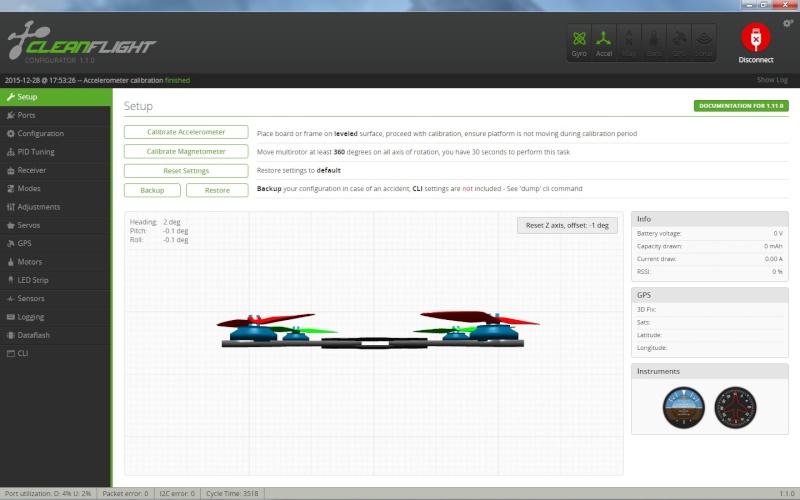
Et pour ce qui ne save pas , ou qui arrive pas a calibré le magnétomètre, regardez cette vidéo https://www.youtube.com/watch?v=UB2YuISkqgo
Partit Configuration, Orientation du ZMR250 mettre 90 dans le Yaw Adjustment [deg] dans MOTOR_STOP ,cliquer dessus pour activée, vos moteurs ne tourneront PAS lorsque vous allez armer le drone, c'est plus prudent. oubliez pas de sauvegardez.
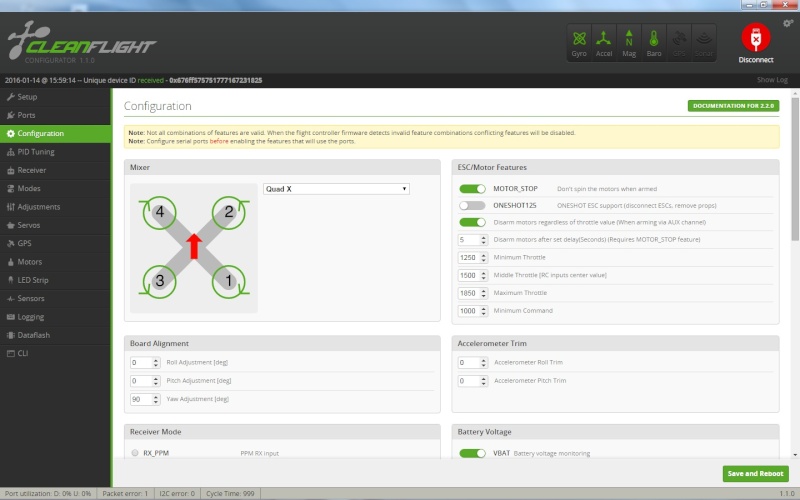
J'ai placer ma Flip32 Full, port usb coté gauche donc a 90°, a l'avant du drone comme sur l'image:

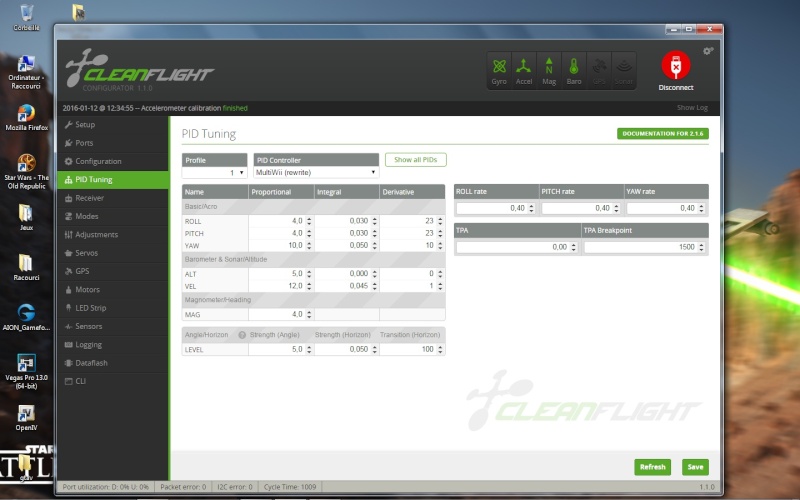
Partit PID Tuning voici se que j'ai mis dans les pid, ( alors les Rates, plus il sons élevé plus le quadri sera sensible et réactif, plus les rates sont bas, plus le quadri sera Faible
Vous pouvez les ajustez en fonction de vos besoins , montez ou descendez de 0.05 a chaque fois, oubliez pas de sauvegardez.
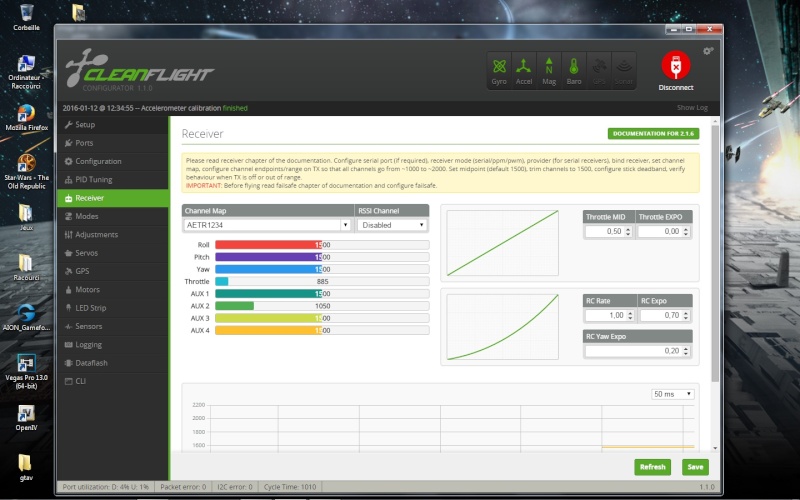
Partit Receiver dans RC Rate mettre 1.00 c'est pour le rendre plus sensible au d’écolage, mais vous pouvez le descendre en fonction de vos besoin, descendez de 0.10 a chaque fois, et testé, ou montez de 0.10 a vous de jaugé, oubliez pas de sauvegardez:
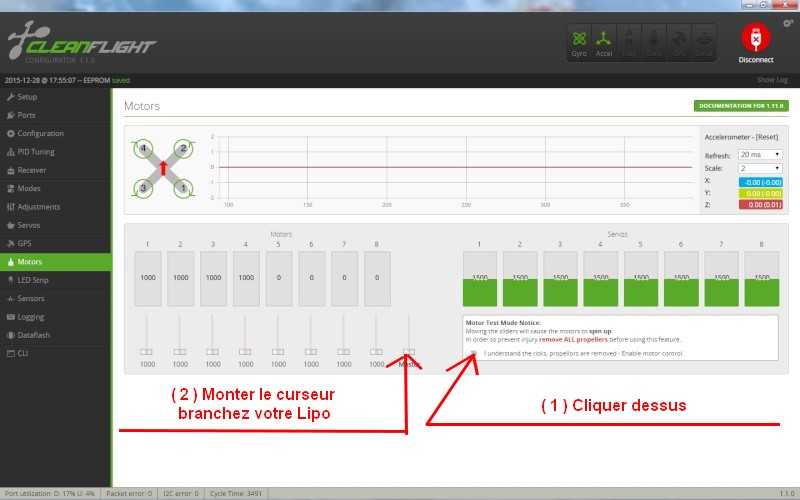
Dans motor, faite le calibrage des ESC, enlève les hélices vous avez un curseur en bas a droite marquer Motor Test Mode cliquer dessus,
placer le curseur « Master » au maximum
brancher la lipo
Vos esc sonne une première fois pour indiquer qu’ils sont en mode calibration ( chaque marque de ESC sonne différemment attention )
Lorsque vos esc ont terminé de sonnez, baissé le curseur « Master » au minimum très rapidement
Vos esc re-sonne pour confirmer qu’ils ont bien enregistré les valeur minimum
La calibration est terminée, je débranche ma lipo.
Je décoche la case « Motor Test Mode »
La calibration de Vos ESC son terminez.
oubliez pas de sauvegardez.
Inter de la Radio FlySky FS-TH9XB:
L'image parle mieux.

Ce qu'il faut mettre comme commande dans la Radio FlySky FS-TH9XB
J’oubliai, que sur cette radio les gaze son inversé, car quand vous montez votre stick de gauche en haut, le drone décélère, et quand vous descendez le stick
de gauche en bas, le drone accélère, donc allez sur la radio dans le Menu – Func Setting – Reverse – aller sur Thr je les déplacer sur la droite et validé.
Et aussi allez dans le menue de la Radio dans menu, system setting et stick set , est choisissez mode 2 puis validé sur menu 2 fois, pour quoi car
les gaze se retrouverez sur le stick de droite, alors qu'il doive être sur le stick de gauche voilà tout.
Partit Modes
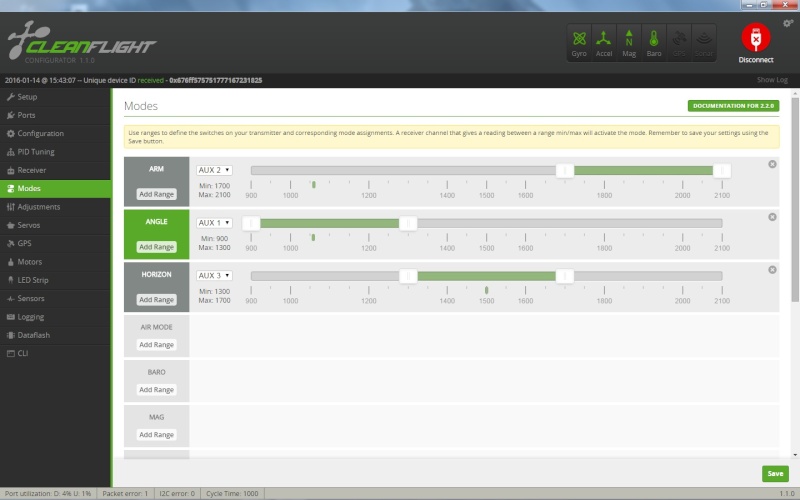
Alors dans ARM a gauche mettre AUX2 pour l'armement de la radio le curseur le placer sur 1250 Min, est 2100 Max pour armé le drone.
Dans ANGLE a gauche mettre AUX1 pour le mode Angle placer le curseur a 900 Min , est 1300 Max, cela vas vous permettre des que vous allez armé le drone, de passer directement en mode Angle , mais si vous lever ( Basculer ) l'inter de votre radio vair le haut, vous passerez en mode Horizon vise vérsa .
Dans HORIZON a gauche mettre AUX3 pour le mode Horizon placer le curseur a 1300 Min, est 1700 Max, comme je le disais plus haut ^^ quand vous allez basculer L'inter vair le haut vous serrez en mode Horizon , mais si vous descendez l'inter vair le bas, vous serrez en mode Angle, vise vérsa.
Voilà je croie que j'ai fait le tours, si j'ai oublier quoi que se soit, je le rajouterai , donc si sa peut aidez des personnes en difficulté qui on les même matos que moi cela serra surement très efficace pour eux.
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
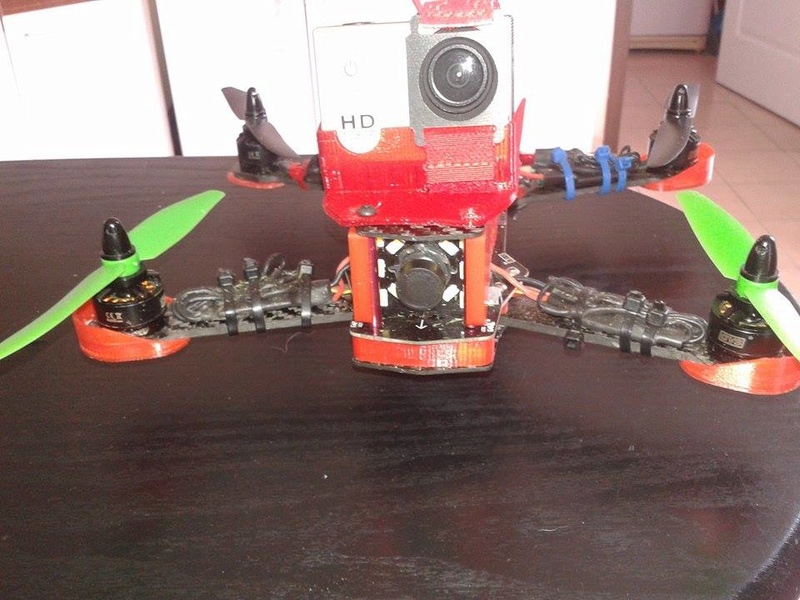
Voici 2 photos du ZMR250 a l'heure actuel :


Je mettrai d'autre photos du ZMR250 quand je recevrai les protèges moteurs est la Bulle
Matériels:
Châssis: ZMR250 http://www.banggood.com/fr/QAV250-250mm ... 08201307E0
Hélice: Gemfan 5030 pouces en plastique 5030 Hélice CW / CCW Pour 240 250 Cadre http://www.banggood.com/fr/Gemfan-5x3-I ... 37866.html
Carte mère: Flip32 Full http://www.banggood.com/fr/Naze32-Fligh ... 53849.html
Plaque distribution zmr/qav: http://www.banggood.com/fr/Diatone-ZMR2 ... 76127.html
Buzer: 7.4V -11.1V 2S-3S Lipo RC Batterie basse tension Indicateur d’alarme ( ce branche sur la batterie ) http://www.banggood.com/fr/Wholesale-7_ ... 25595.html
4 moteurs DYS BE1806 – 2300kv http://www.banggood.com/fr/DYS-BE1806-2 ... 46416.html
4 ESC EMAX SimonK series 12A http://www.banggood.com/fr/Emax-Simonk- ... 18126.html
Radio commande 2.4Ghz FlySky FS-TH9XB Mode 2 ( le récepteur et bien livrais avec la radio ) http://www.banggood.com/fr/Wholesale-Fl ... 47904.html
Led avant du ZMR250 http://www.ebay.fr/itm/Mini-Camera-Moun ... 3f51bd86b8
Rehausseur pour la fram http://www.ebay.fr/itm/ZMR250-ALL-IN-ON ... 5OUTb3w-FA
Led rouge a l'arrière du ZMR250 http://www.hobbyking.com/hobbyking/stor ... aff=613835
Batterie Lion puissance 11.1v 1500mAh 40c batterie lipo bt695 http://www.banggood.com/fr/Wholesale-Li ... 65641.html
Chargeur Lipo Imax B6 http://www.banggood.com/fr/Wholesale-IM ... 46220.html
j'ai opté pour se récepteur car il et plus petit et plus léger: Hobby King 2.4Ghz Receiver 6Ch V2 http://www.hobbyking.com/hobbyking/stor ... duct=33383
Canopy Shell Hood Cover For Robocat 270 270mm Racing http://www.ebay.fr/itm/121780815831?_tr ... EBIDX%3AIT
http://www.ebay.fr/itm/ZMR250-Vented-si ... 4d3cfc504f
Voilà je croit con na fait le tour pour le matos.
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Branchement de vos modules:
Branchez les esc est les moteurs.
Prenez déjà votre plaque de distribution est soudez vos ESC comme sur l'image:
Vous avez 3 files noir sur les esc, est 3 files noir sur les moteurs raccordez lé, une fois finis branchez les fiche de 3 couleur, ( marron, rouge, jaune ) des esc
sur la flip32 , a oui, sur une des fiches de 3 couleur du esc, vous allez gardez le files marron, rouge, jaune, normale jusqu’à là , est sur les autre file de 3 couleur vous allez enlevez le file rouge.
Vous aller gagner de l’énergie et du poids pour votre drone.
Branchement des fiches sur flip32 voici l'image:
Moteur arrière droit je le branche sur le M1
Moteur arrière gauche sur M3
Moteur haut droite sur M2
Moteur haut gauche sur M4
Les M1, M2, M3, M4 et marquer sur la flip32 pour vous repérez.
Maintenant pour le branchement du récepteur radio.
Sur la flip32 est le récepteur, vous avez de marquer, CH1, CH2, CH3, CH4 etc... vous branchez vaux fiches suivent l'ordre numéroté, aussi vous allez gardez sur une de vaux fiches les 3 couleurs donc ( noire, rouge, blanc, ) est sur les autres fiches vous enlevez le file rouge est le noire, faite cette manipe si vous êtes bien en PWM.
Vous aller gagner de l’énergie et du poids pour votre drone.
Pour le reste des soudures regardez sur l'image, de la distribution ^^
Maintenant pour voir le sans de rotation de chaque moteurs, voici une image qui l’explique:
Si vos moteurs ne tourne pas dans le bon sans, inversé n’importe quelle files des 3 file noire branché du esc aux moteur, est cela serra bon.
Placement des hélices dans le bon sans.
Vous allez voire que sur les flan de l'hélice il y a des numéros avec une lettre.
Celles avec un R doivent tourner dans le sans des aiguilles d’une montre.
(c’est écris sur le dessus de l’hélice : 5030R ou 5030).
Placé votre drone de façon verticale , le nez du drone face au mure , et le cu du drone vair vous.
En haut a gauche hélice 5030R
En haut a droite hélice 5030
En bas a gauche hélice 5030
En bas a droite hélice 5030R
Réglage du Zmr250 avec le soft
Pour utiliser se soft il faut être sur Google Chrome, oubliez pas.
Alors télécharger CleanFlight ici, puis après télécharger le soft Betaflight version 2.2.0 , ou la dernière version suivante, pour ma part j'ai pris betaflight_NAZE.hex car je suis en Flip32, vous trouverez le lien Betaflight ici, une fois fini de télécharger le fichier, m'été le fichier sur votre bureau, Lancez le configurateur Chrome pour Cleanflight, puis cliquez sur « Load Firmware [Local] » et allez cherchez le fichier .hex (ou .bin) que vous venez de télécharger que vous avez mis sur votre bureau, Assurez-vous que la case « Full chip erase » est bien cochée (verte).
Cliquez ensuite sur « Flash Firmware ».
Si tout s’est bien passé, vous devriez voir cette ligne apparaître :
Votre Flip32 est maintenant flashée, débranchez et rebranchez votre Flip32 et appuyez sur le bouton « Connect » en haut a droite dans CleanFlight.
Dans setup faite un calibrage accelerometre , est un calibrage magnétometre, mettre son Drone sur une surface plate, est bien au niveau,
c'est important.
Et pour ce qui ne save pas , ou qui arrive pas a calibré le magnétomètre, regardez cette vidéo https://www.youtube.com/watch?v=UB2YuISkqgo
Partit Configuration, Orientation du ZMR250 mettre 90 dans le Yaw Adjustment [deg] dans MOTOR_STOP ,cliquer dessus pour activée, vos moteurs ne tourneront PAS lorsque vous allez armer le drone, c'est plus prudent. oubliez pas de sauvegardez.
J'ai placer ma Flip32 Full, port usb coté gauche donc a 90°, a l'avant du drone comme sur l'image:
Partit PID Tuning voici se que j'ai mis dans les pid, ( alors les Rates, plus il sons élevé plus le quadri sera sensible et réactif, plus les rates sont bas, plus le quadri sera Faible
Vous pouvez les ajustez en fonction de vos besoins , montez ou descendez de 0.05 a chaque fois, oubliez pas de sauvegardez.
Partit Receiver dans RC Rate mettre 1.00 c'est pour le rendre plus sensible au d’écolage, mais vous pouvez le descendre en fonction de vos besoin, descendez de 0.10 a chaque fois, et testé, ou montez de 0.10 a vous de jaugé, oubliez pas de sauvegardez:
Dans motor, faite le calibrage des ESC, enlève les hélices vous avez un curseur en bas a droite marquer Motor Test Mode cliquer dessus,
placer le curseur « Master » au maximum
brancher la lipo
Vos esc sonne une première fois pour indiquer qu’ils sont en mode calibration ( chaque marque de ESC sonne différemment attention )
Lorsque vos esc ont terminé de sonnez, baissé le curseur « Master » au minimum très rapidement
Vos esc re-sonne pour confirmer qu’ils ont bien enregistré les valeur minimum
La calibration est terminée, je débranche ma lipo.
Je décoche la case « Motor Test Mode »
La calibration de Vos ESC son terminez.
oubliez pas de sauvegardez.
Inter de la Radio FlySky FS-TH9XB:
L'image parle mieux.
Ce qu'il faut mettre comme commande dans la Radio FlySky FS-TH9XB
- Code:
– J'ai mis ma Radio en mode ACRO ( petit logo avion )
– je me suis rendu dans FUNC SETTINGS > PROG.MIX
– Dans MIX1 j'ai mis les valeurs suivantes :
STATE ACT
MASTER AUX
SLAVE AUX2
OFFSET 000
UPRATE -050
DNRATE 000
SW NOR
– Dans MIX2 j'ai mis les valeurs suivantes :
STATE ACT
MASTER AUX
SLAVE AUX2
OFFSET 000
UPRATE 000
DNRATE 000
SW ID1
– Dans MIX3 j'ai mis les valeurs suivantes :
STATE ACT
MASTER AUX
SLAVE AUX2
OFFSET 000
UPRATE 050
DNRATE 000
SW ID2
– Ensuite dans AUX-CH j'ai configurer l’affectation des switchs sur les auxiliaires.
CH6 THRO HOLD
CH7 PIT TRIM
CH8 NULL
CH9 NULL
J’oubliai, que sur cette radio les gaze son inversé, car quand vous montez votre stick de gauche en haut, le drone décélère, et quand vous descendez le stick
de gauche en bas, le drone accélère, donc allez sur la radio dans le Menu – Func Setting – Reverse – aller sur Thr je les déplacer sur la droite et validé.
Et aussi allez dans le menue de la Radio dans menu, system setting et stick set , est choisissez mode 2 puis validé sur menu 2 fois, pour quoi car
les gaze se retrouverez sur le stick de droite, alors qu'il doive être sur le stick de gauche voilà tout.
Partit Modes
Alors dans ARM a gauche mettre AUX2 pour l'armement de la radio le curseur le placer sur 1250 Min, est 2100 Max pour armé le drone.
Dans ANGLE a gauche mettre AUX1 pour le mode Angle placer le curseur a 900 Min , est 1300 Max, cela vas vous permettre des que vous allez armé le drone, de passer directement en mode Angle , mais si vous lever ( Basculer ) l'inter de votre radio vair le haut, vous passerez en mode Horizon vise vérsa .
Dans HORIZON a gauche mettre AUX3 pour le mode Horizon placer le curseur a 1300 Min, est 1700 Max, comme je le disais plus haut ^^ quand vous allez basculer L'inter vair le haut vous serrez en mode Horizon , mais si vous descendez l'inter vair le bas, vous serrez en mode Angle, vise vérsa.
Voilà je croie que j'ai fait le tours, si j'ai oublier quoi que se soit, je le rajouterai , donc si sa peut aidez des personnes en difficulté qui on les même matos que moi cela serra surement très efficace pour eux.
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Voici 2 photos du ZMR250 a l'heure actuel :
Je mettrai d'autre photos du ZMR250 quand je recevrai les protèges moteurs est la Bulle
Dernière édition par Seb03000 le Lun 18 Jan - 11:36, édité 1 fois